[GÉNÉTIQUE] Les NON-GOLEMS tendent quasi-systématiquement vers le LIBÉRALISME
Le 13 novembre 2024 à 10:31:15 :
Il y a tout un tas de choses qui pourraient rendre les véhicules autonomes encore plus sûrs, par exemple, s'il y a une bosse sur la route, les capteurs devraient l'enregistrer, localiser précisément la bosse et l'envoyer dans une base de données pour que les autres voitures puissent être averties et ralentir (plutôt que de simplement repérer la bosse par IA), mais pour le moment, ce genre de systèmes n'existent pas en vie réelle, ou ne sont pas répandus
Il y a déjà ce genre de système en collaboratif (et donc manuel) via des applis comme Waze. Intégrer et automatiser cela sur les voitures autonomes pour mettre à jour les cartographies qu'elles utilisent est simple et les constructeurs y ont certainement déjà pensé. Il faudrait également l'inverse : si la bosse est rabotée ou le nid de poule rebouché, il faudrait que ça soit détecté et mis à jour pour éviter un ralentissement inutile.
Le 14 novembre 2024 à 00:55:42 :
Le 13 novembre 2024 à 10:31:15 :
Il y a tout un tas de choses qui pourraient rendre les véhicules autonomes encore plus sûrs, par exemple, s'il y a une bosse sur la route, les capteurs devraient l'enregistrer, localiser précisément la bosse et l'envoyer dans une base de données pour que les autres voitures puissent être averties et ralentir (plutôt que de simplement repérer la bosse par IA), mais pour le moment, ce genre de systèmes n'existent pas en vie réelle, ou ne sont pas répandusIl y a déjà ce genre de système en collaboratif (et donc manuel) via des applis comme Waze. Intégrer et automatiser cela sur les voitures autonomes pour mettre à jour les cartographies qu'elles utilisent est simple et les constructeurs y ont certainement déjà pensé. Il faudrait également l'inverse : si la bosse est rabotée ou le nid de poule rebouché, il faudrait que ça soit détecté et mis à jour pour éviter un ralentissement inutile.
Oui, évidemment, mais ce qu'il faut ici, c'est un système normalisé, car il faut un protocole compatible et sécuritaire pour interagir, en sachant aussi que les voitures peuvent être transfrontalières et qu'il existe divers types de routes. Je pense aussi que le système devrait être capable de pouvoir faire des mises à jour, et que, dans certains cas, un système non à jour ne devrait pas pouvoir circuler sur certaines routes, selon les conditions fixées par les exploitants.
Faire en sorte que les systèmes vitaux n'aient pas de bugs impliquant la sécurité est un défi, car la plupart des gens ne veulent pas que ce genre de choses n’arrivent même une seule fois en vie réelle, d’autant plus que ce sont souvent des bugs stupides, c’est une question qui revient fréquemment pour les industriels quand ils conçoivent des systèmes CBTC pour le métro (incluant notamment l’automatisation intégrale), et il est facile de dire après un accident que c’était évident et que cela aurait pu être prévenu. (Je précise aussi que je n’ai pas connaissance d’accident significatif ou mortel impliquant un système CBTC avec automatisation intégrale, donc les systèmes fonctionnent bien) ; cela dit, je pense qu’il faut distinguer les erreurs de programmation et de logique, des erreurs d’appréciation et d’imagination. (d’ailleurs, jusqu’à récemment, j’en profite pour rappeler que les portes palières de la ligne 14 n’avaient même pas de détecteur de mouvement et que le temps de stationnement était fixe, ce qui pourrait être une erreur d'appréciation)
Ces problèmes de conception ne se limitent pas au code lui-même, il faut aussi que le matériel ne tombe pas en défaillance, or les pannes sont quasi-inévitables. Par exemple, un capteur pourrait renvoyer la mauvaise vitesse d’un métro, faire croire qu’une porte est fermée alors qu’elle est ouverte, une mauvaise position du métro créant faussement des cantons libres, ou bien les capteurs de surcharge pourraient renvoyer de mauvaises données, impactant le calcul des distances de freinage, etc.
Éviter tous ces problèmes est complexe, de sorte qu’il faut généralement de la redondance et une fine connaissance du matériel utilisé, ce qui demande l’avis de très nombreux experts, et même, toujours plus à mesure que l’on approfondit les sujets.
Mais ces problèmes ne se présentent pas uniquement en cas d’automatisation, et j’ai d’ailleurs critiqué plein de fois les normes car les gens réfléchissent encore moins à ce qu’ils font (même si les normes de sécurité sont toujours importantes, elles ne devraient pas remplacer l’imagination, la logique, etc.)
Par exemple, lorsque la rame MF 01 a déraillé en 2016 (aucun mort), c’était à cause d’un onduleur qui est tombé sur les voies, la norme de fixation prenait en compte les vibrations, or, elles ne prenaient pas en compte les vibrations "auto-induites" par le coffret onduleur lui-même, ce qui a causé sa chute et le déraillement d’une rame (qui a été jugée irrécupérable par la suite)
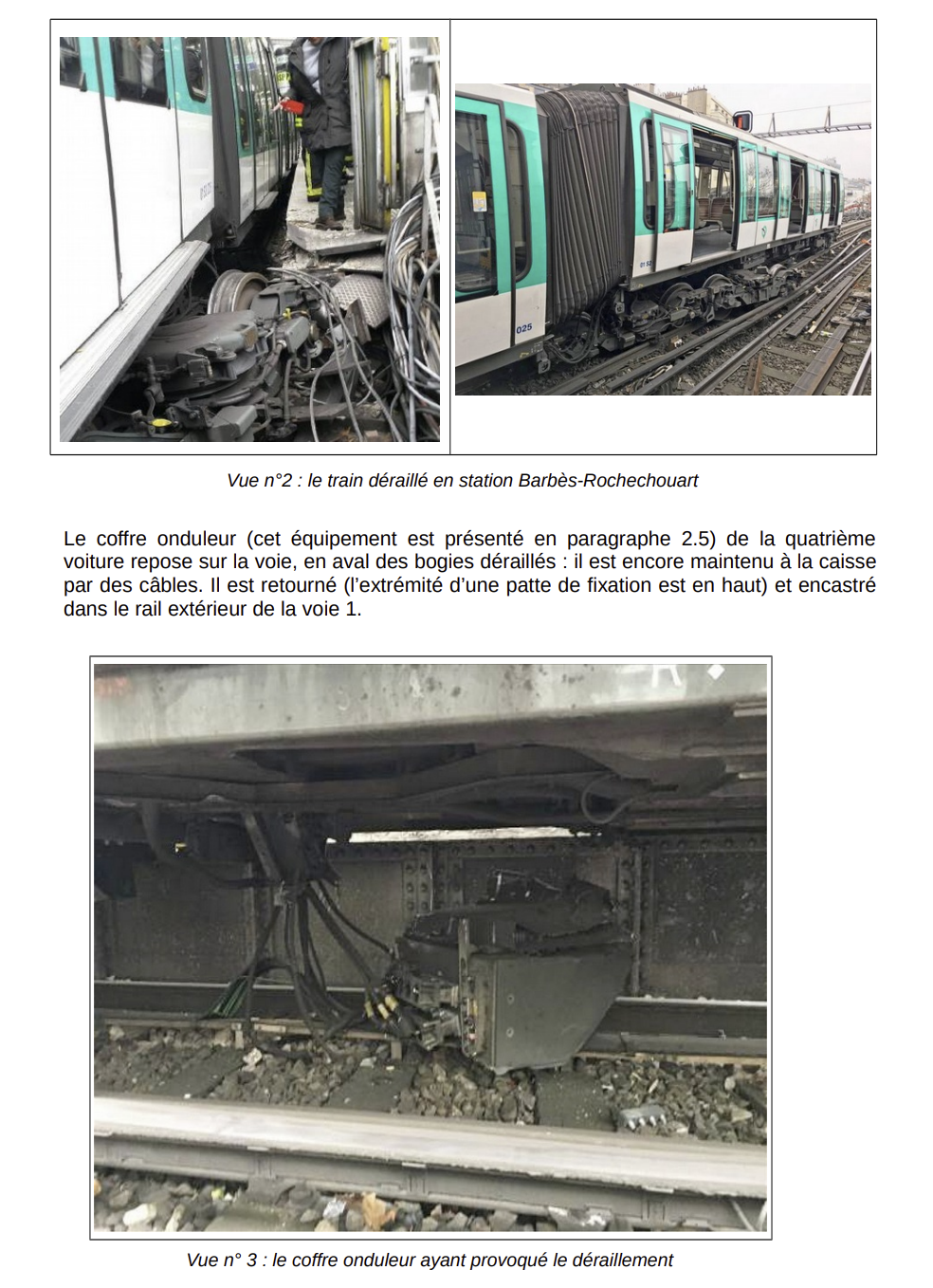
(Par ailleurs, dans de nombreux cas, comme celui-ci, même en imaginant certains scénarios, il n’existe pas de façon parfaite de prédire l'évolution des matériaux dans certaines conditions, c’est un domaine de recherche en physique)
https://www.bea-tt.developpement-durable.gouv.fr/IMG/pdf/rapport_beatt_2016-009.pdf
Donc, il y a tout un tas de compromis à faire sur les automatismes des véhicules autonomes entre précautions et surenchère sécuritaire au détriment des coûts, ce n’est jamais facile d’estimer les probabilités que les choses tournent mal. Par exemple, des "modules vitaux" (serveurs) se trouvent à l’avant et à l’arrière du métro (à Paris, caché sous le faux tableau de bord, il y a un réel tableau en-dessous, et un module vital avec des serveurs encore en-dessous, qui est l’une des composantes du CBTC), et ce système dispose d’un blindage électromagnétique, de sorte à éviter les interférences électromagnétiques avec le ferroviaire, or, ça semble être une précaution ridiculement extrême, et qui peut être coûteuse selon les blindages et leur profil d’atténuation, car les processeurs disposent de mitigations, que le code lui-même peut être redondé, et sans parler du matériel lui-même redondé.
Aussi, les systèmes les plus critiques reposent sur des "automates programmables industriels", qui sont des ordinateurs simples, avec souvent des processeurs personnalisés dans le cas du CBTC (imaginez, par exemple, si un système critique se mettait à freezer, quand il faut prendre une décision rapidement). De même, la programmation requiert des normes scrupuleuses, et il existe une base "sécuritaire " (on peut aussi parler de trusted computing base / TCB, mais c’est plus commun pour les vulnérabilités) où le code doit être le plus simple et intelligible possible, afin d’éviter des bugs inattendus. Des techniques comme la "programmation défense" sont utilisées à cet effet, et sont souvent définies dans les normes, ce sont des concepts à appliquer en programmant.
Pour ma part, je pense qu’il faut différencier les niveaux de sécurité en plusieurs grades, et les compartimenter, aussi bien d’un point de vue matériel que logiciel.
Les systèmes devraient aussi pouvoir s'adapter en cas d'incidents graves et atypiques, par exemple, un départ de feu.
Il faut aussi prendre en compte que des gens chercheront à les détourner, et prévoir des systèmes permettant d’exclure de "bannir" des ID de véhicules autonomes au cas où les choses tourneraient mal (à ce titre, un système de cryptographie asymétrique pourrait être une option nécessaire), d’ailleurs des attaques ont même été imaginées où quelqu’un ferait une sorte de "DDoS" sur des routes, en ordonnant à des véhicules de se diriger à un point précis.
à mon avis, le plus gros risque (en terme de gravité) n’est pas qu’un accident mortel soit causé par un bug, car de toute manière, les accidents se produiront, peu importe la cause, mais que les technologies soient détournées de manière massive à des fins malveillantes (en IA, d'ailleurs, il existe les attaques adversaires, mais ce n'est qu'une des façons potentielles de procéder)
Le 14 novembre 2024 à 01:54:35 :
Le 14 novembre 2024 à 00:55:42 :
Le 13 novembre 2024 à 10:31:15 :
Il y a tout un tas de choses qui pourraient rendre les véhicules autonomes encore plus sûrs, par exemple, s'il y a une bosse sur la route, les capteurs devraient l'enregistrer, localiser précisément la bosse et l'envoyer dans une base de données pour que les autres voitures puissent être averties et ralentir (plutôt que de simplement repérer la bosse par IA), mais pour le moment, ce genre de systèmes n'existent pas en vie réelle, ou ne sont pas répandusIl y a déjà ce genre de système en collaboratif (et donc manuel) via des applis comme Waze. Intégrer et automatiser cela sur les voitures autonomes pour mettre à jour les cartographies qu'elles utilisent est simple et les constructeurs y ont certainement déjà pensé. Il faudrait également l'inverse : si la bosse est rabotée ou le nid de poule rebouché, il faudrait que ça soit détecté et mis à jour pour éviter un ralentissement inutile.
Oui, évidemment, mais ce qu'il faut ici, c'est un système normalisé, car il faut un protocole compatible et sécuritaire pour interagir, en sachant aussi que les voitures peuvent être transfrontalières et qu'il existe divers types de routes. Je pense aussi que le système devrait être capable de pouvoir faire des mises à jour, et que, dans certains cas, un système non à jour ne devrait pas pouvoir circuler sur certaines routes, selon les conditions fixées par les exploitants.
Vraiment pour des cas particuliers alors, parce que ça pourrait potentiellement entrainer plus de problèmes que les limiter si l'utilisateur décide de rouler en manuel.
Faire en sorte que les systèmes vitaux n'aient pas de bugs impliquant la sécurité est un défi, car la plupart des gens ne veulent pas que ce genre de choses n’arrivent même une seule fois en vie réelle, d’autant plus que ce sont souvent des bugs stupides, c’est une question qui revient fréquemment pour les industriels quand ils conçoivent des systèmes CBTC pour le métro (incluant notamment l’automatisation intégrale), et il est facile de dire après un accident que c’était évident et que cela aurait pu être prévenu. (Je précise aussi que je n’ai pas connaissance d’accident significatif ou mortel impliquant un système CBTC avec automatisation intégrale, donc les systèmes fonctionnent bien) ; cela dit, je pense qu’il faut distinguer les erreurs de programmation et de logique, des erreurs d’appréciation et d’imagination.
C'est vrai. Cela dit il est probable qu'on arrive rapidement à un stade où la proportion d'accidents impliquant des voitures autonomes (quelle que soit la cause) soit moins élevée que celle impliquant des voitures non autonomes. Après ça peut aussi potentiellement pénaliser les conducteurs très prudents et vigilants, victimes d'un bug. Et inversement, ça favoriser les fous du volant et leurs victimes. Ce qui pourrait être frustrant pour les bons conducteurs.
Donc, il y a tout un tas de compromis à faire sur les automatismes des véhicules autonomes entre précautions et surenchère sécuritaire au détriment des coûts, ce n’est jamais facile d’estimer les probabilités que les choses tournent mal.
On trouvera un équilibre par tâtonnement.
Il faut aussi prendre en compte que des gens chercheront à les détourner, et prévoir des systèmes permettant d’exclure de "bannir" des ID de véhicules autonomes au cas où les choses tourneraient mal (à ce titre, un système de cryptographie asymétrique pourrait être une option nécessaire), d’ailleurs des attaques ont même été imaginées où quelqu’un ferait une sorte de "DDoS" sur des routes, en ordonnant à des véhicules de se diriger à un point précis.
à mon avis, le plus gros risque (en terme de gravité) n’est pas qu’un accident mortel soit causé par un bug, car de toute manière, les accidents se produiront, peu importe la cause, mais que les technologies soient détournées de manière massive à des fins malveillantes (en IA, d'ailleurs, il existe les attaques adversaires, mais ce n'est qu'une des façons potentielles de procéder)
Oui c'est évidemment l'un voir le plus gros risque. Je n'y connais rien en cybersécurité.
Vraiment pour des cas particuliers alors, parce que ça pourrait potentiellement entrainer plus de problèmes que les limiter si l'utilisateur décide de rouler en manuel.
Le problème, c'est que les systèmes vont évoluer d'un côté et on se retrouvera avec plein de versions différentes, de sorte que ces différences vont créer une incertitude toujours plus grande sur les potentiels bugs pouvant se produire, lors des interactions avec des systèmes de différentes générations (c'est vrai pour les protocoles informatique, mais aussi pour le matériel lui-même, les données renvoyées par différents matériels ne seront pas forcément comparables en terme de compatibilité, ni même interprétable de la même manière, d'une sorte qu'une conversion serait nécessaire) - et comme on le sait, plus les choses deviennent complexes, plus les erreurs se rapprochent, s'il existe 10 générations différentes, on risque bien de manquer l'erreur entre une interaction d'un système spécifique à, par exemple, la génération 3 avec la génération 8
Il peut être possible de faire une compatibilité descendante comme pour les processeurs (même si ce n'est pas totalement comparable ici, vu qu'on parle de sécurité), mais ce serait extrêmement complexe, nécessiterait des compromis qui finalement pourraient finir par impacter la sécurité elle-même à long terme faute de correction de bugs (pouvant avoir une réaction en cascade sur d'autres systèmes, de telle sorte qu'il serait décidé que la correction est plus risquée que de le laisser telle quelle), ou d'introduction de nouvelles fonctionnalités (interagissant avec d'autres)
Sans compter toutes les autres évolutions technologiques (autres que celles déjà implémentées) impliquant la sécurité, à mon avis, les voitures devraient avoir une "date de péremption" et les matériaux pourraient être réutilisés par le constructeur ou autre, en échange d'un paiement, c'est aussi un compromis à trouver entre la sécurité et la compatibilité
On trouvera un équilibre par tâtonnement.
Je ne pense pas qu'un équilibre raisonné sera forcément trouvé, d'autant plus que les constructeurs préféreraient prendre largement plus de précautions que nécessaires, de sorte que leur responsabilité ne serait pas engagée, et, de façon plus générale, la société hait moindre risque vital lorsque des automatismes sont impliqués, quand bien même il serait statistiquement bien moins probable qu'avec un humain
Oui c'est évidemment l'un voir le plus gros risque. Je n'y connais rien en cybersécurité.
C'est très complexe et vaste, c'est vraiment une question d'imagination, c'est l'art de toujours trouver de nouvelles techniques de manipulation des systèmes et impliquant parfois même des humains, auxquelles d'autres personnes n'ont pas pensé, pris la mesure des conséquences possibles, ou n'ont tout simplement pas pu les corriger moyennant un effort raisonnable, donc, ça peut englober énormément de systèmes et modes d'action différents (pouvant souvent se superposer pour atteindre un objectif, rajoutant de la complexité), et, lorsque des mitigations sont déployées, de nouveaux modes d'action sont en train d'être découverts, sur des systèmes existant, ou de nouveaux systèmes ; cela peut même inclure la compromission de la chaîne de production des véhicules, ou des usines de semi-conducteurs, et pourquoi pas même les vendeurs de machine de lithographie EUV comme Trumpf (fabricant de lasers) ou ASML (fabricant de machines laser, utilisées par TSMC) ou Applied Materials, etc.
Ça sera un UP et c'est tout.
Encore un qui décompense sur jvc
reprends rendez-vous et règle la dose de tes médocs kheyou


Le 14 novembre 2024 à 11:12:06 :
Le mec n'a pas pris de douche depuis 12 ans et viens expliquer la vie.
Je suis le mieux placé pour expliquer la vie
Le 14 novembre 2024 à 11:12:06 :
Le mec n'a pas pris de douche depuis 12 ans et viens expliquer la vie.
Je suis le mieux placé pour expliquer la vie
+ ça ne fait pas 12 ans
Il est souvent impossible de leur enseigner les nombreuses exigences de propreté et de soins corporels. Même à l’âge adulte, on peut les voir se promener négligés et sales, y compris ceux qui ont entrepris une carrière universitaire.
Source : Autistic psychopathy in childhood, Hans Asperger, 1944 ; traduction de Uta Frith, page 82 (1991)
(en fait, je dirais plutôt que ce n'est pas la propreté en elle-même, mais c'est plus spécifique à la douche et aussi dans une moindre mesure dans d'autres domaines liés à l'entretien, pour une raison obscure, encore une fois, il a fait une généralisation à tout un domaine ; c'est-à-dire que les gens pourraient en déduire qu'ils laissent par exemple s'accumuler les déchets chez eux comme les "syndrome de Diogène", ce qui n'est pas le cas ici, ou alors ce n'est pas du tout commun en tout cas)
Le capitalisme est de droite
L'extrême capitalisme est d'extrême droite
.gif ":)")
Le 14 novembre 2024 à 11:49:01 :
Le capitalisme est de droite
L'extrême capitalisme est d'extrême droite
Son pavé ne parle pas de libéralisme mais de son amour pour les trains et des aventures de Thomas la petite locomotive. 
Les tags d'Antoineforum sur Deb0ucled bordel j'ai hurlé 
Données du topic
- Auteur
- AntoineForum206
- Date de création
- 11 novembre 2024 à 21:18:35
- Nb. messages archivés
- 236
- Nb. messages JVC
- 168